Equipe VSSS
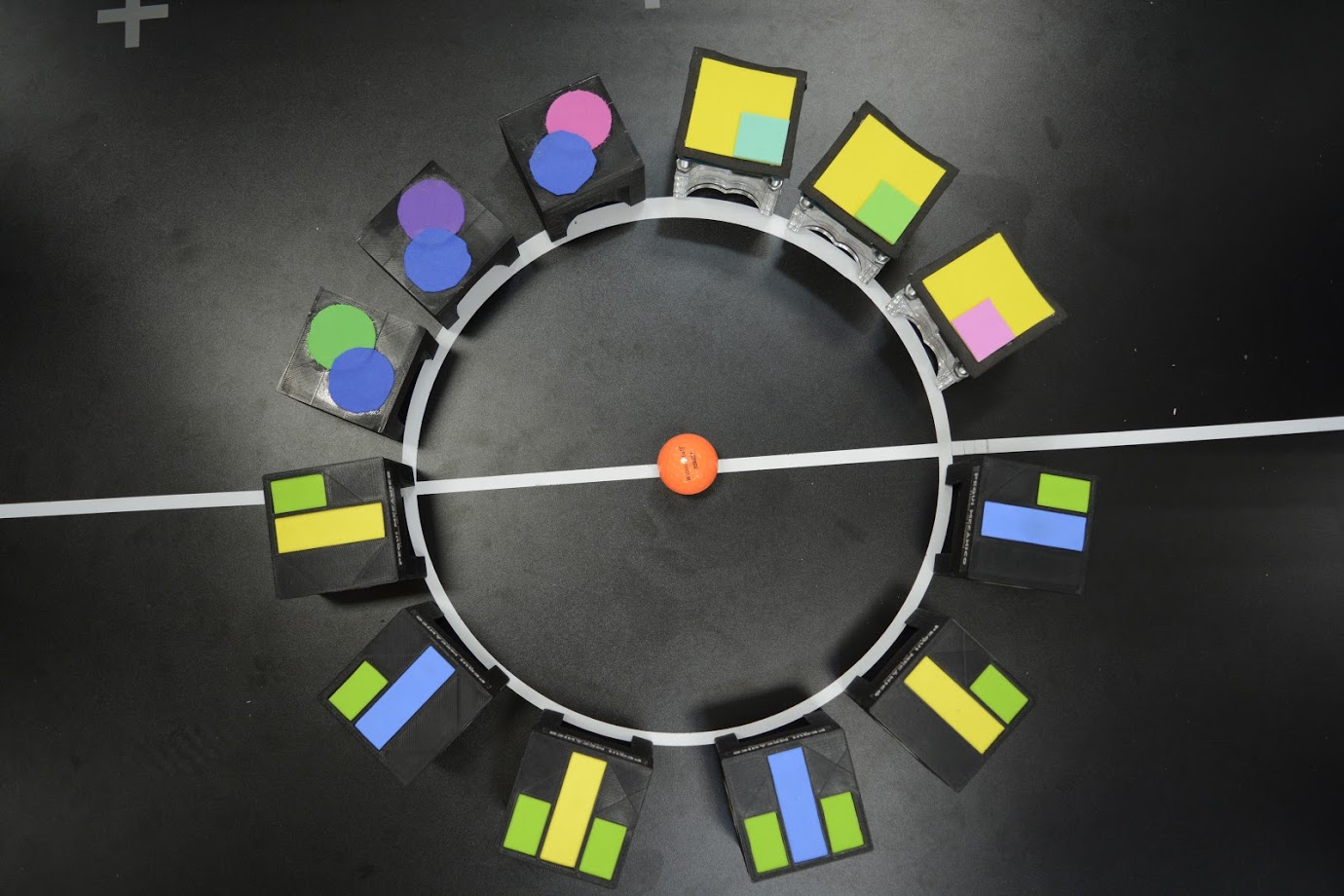
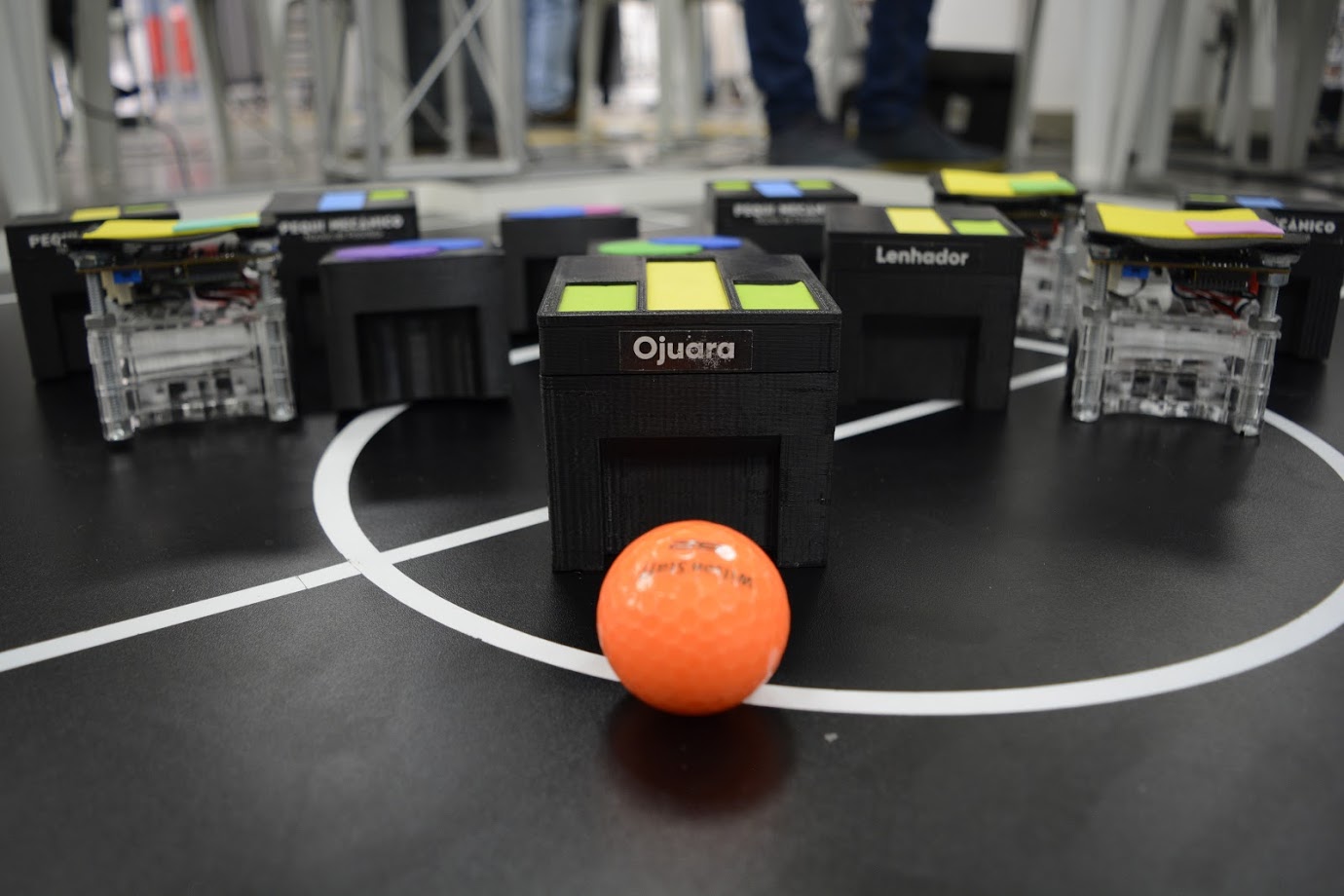
IEEE Very Small Size SoccerNa categoria IEEE Very Small Size Soccer, dois times de três robôs autônomos se enfrentam em partidas de futebol, sem intervenção humana. Cada equipe desenvolve um software que utiliza visão computacional para estimar a localização dos robôs e da bola, decide a estratégia de jogo e envia comandos para os robôs através de rádio.
Os robôs desenvolvidos têm até 7,5×7,5×7,5 cm, são do tipo diferencial e implementam um sistema de controle responsável por executar os comandos recebidos do computador.
Neste projeto existem quatro áreas de pesquisa: Visão, Controle, Eletrônica e Estrutura.
Conheça a equipe
Capitã(o) de Equipe: Werikcyano Lima Guimarães - werikguimaraes@gmail.com

Luana Oliveira
Engenharia Elétrica
Murilo Mesquita
Engenharia de Computação
Pedro Carlos
Engenharia Elétrica
Werikcyano Lima Guimarães
Engenharia de ComputaçãoGaleria de Fotos